
|
|
|
Rus/Eng |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
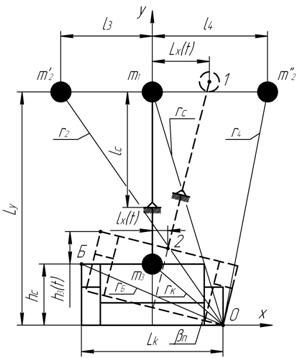
"Хвойные бореальной зоны" 2008г.,№1-2, с. 168-172 Механико-математические модели динамики боковых нагрузок на технологическое оборудование лесопогрузчика Полетайкин В.Ф., Черник Д.В. ГОУ ВПО «Сибирский государственный технологический университет» Гусеничные лесопогрузчики на базе лесопромышленных тракторов ТТ-4М с полужесткой подвеской корпуса широко используются в лесной промышленности России. При движении с грузом через препятствия одним бортом, при смещении центра тяжести груза относительно продольной оси машины возникают динамические нагрузки в поперечно-вертикальной плоскости, которые необходимо учитывать при проектировании лесопогрузчиков. С целью моделирования режимов движения разработаны механико-математические модели лесопогрузчика, учитывающие параметры динамической системы и условия эксплуатации (упругие характеристики элементов системы и груза, скорость движения машины, высоту преодолеваемых препятствий и другие), позволяющие исследовать влияние этих факторов на динамику боковых нагрузок на технологическое оборудование. Ключевые слова: гусеничный лесопогрузчик, механико-математическая модель, динамика боковых нагрузок The caterpillar loggers on the base tractors TT-4M of timber industry with semirigid suspension of frame extensively used in Russian timber industry. While at the moving with a load over obstacles at one side machine, at the displacement of load of gravity center relatively long axis of machine appear dynamic loads in transversely- vertical plane, which necessary take into account when designing the loggers. In the developmental stage of mechanical simulators of loggers there must be taken account of some factors, e.g. elastic characteristics of different elements both of the system and it’s load, a velocity of logger, height of cleared obstacles and others. These simulators allow investigate the influence of the above listen factors on the dynamics of side loads of the technology equipment. Key worlds: the caterpillar logger, mechanical simulator, dynamic of side load Введение Динамические нагрузки на технологическое оборудование в боковом направлении в режиме грузового хода лесопогрузчика возникают при наезде на препятствие одним бортом машины, при смещении центра тяжести груза относительно продольной оси, при движении машины поперек уклона погрузочной площадки. Кроме того, при колебаниях пакета хлыстов вследствие разности жесткости и массы вершинной и комлевой частей деревьев в поперечной плоскости возникает дополнительный момент. Совпадение указанных факторов во времени обуславливает экстремальные режимы работы, которые необходимо учитывать при проектировании лесопогрузчиков. Для анализа нагрузок на технологическое оборудование в поперечно-вертикальной плоскости необходимо разработать эквивалентные динамические модели системы «лесопогрузчик-груз» при различных сочетаниях подвески корпуса машины и вида транспортируемого груза и их математические модели, учитывающие влияние на уровень нагрузок ряда эксплуатационных факторов: скорости движения, высоты преодолеваемых препятствий, упругих характеристик деревьев, смещения центра тяжести груза от продольной оси машины, угла уклона погрузочной площадки. ТЕОРЕТИЧЕСКАЯ ЧАСТЬ В лесной промышленности России на погрузке древесного сырья в виде хлыстов и деревьев с кроной наибольшее распространение получили гусеничные лесопогрузчики на базе лесопромышленных тракторов с полужесткой подвеской корпуса (ТТ-4М, МТ-5). Ведутся работы по созданию и освоению производства лесопогрузчиков на базе тракторов с эластичной подвеской (ТЛТ 100). Исходя из этого, при разработке эквивалентной динамической модели принимались технические характеристики и конструктивная компоновка лесопогрузчика ЛТ-188 на базе трактора ТТ-4М. При разработке динамической модели учитывается, что наибольшие нагрузки в боковом направлении возникают при расположении стрелы с грузом в вертикальном положении. Масса упругого груза рассматривается сосредоточенной в трех точках, подвешенных на упругих элементах: в центрах тяжести вершинной и комлевой частей расчетного дерева, часть массы дерева, ущемленная захватом, приведена к концу стрелы. На рисунке 1 представлена расчетная схема (динамическая модель), составленная для исследования динамики нагрузок, действующих на технологическое оборудование в поперечно-вертикальной плоскости.
На схеме: m1 – масса подвижных частей рабочего оборудования, динамически приведенная к концу стрелы;
Рисунок 1 – Эквивалентная динамическая модель лесопогрузчика с полужесткой подвеской корпуса с упругим грузом Система дифференциальных уравнений движения масс составлена методом кинетостатики (на основе принципа Даламбера). Перемещения центров масс в процессе колебаний происходят относительно положения устойчивого равновесия. При этом силы тяжести уравновешиваются силами упругости при статической деформации упругих звеньев. Уравнения поперечно-угловых колебаний (перемещений масс в относительном движении) получены в следующем виде:
В уравнениях (2) Q1 (t), Q2 (t), Q3 (t), Q4 (t) – обобщенные силы, соответствующие обобщенным координатам системы – внешние возмущающие воздействия на динамическую систему. Внешними возмущающими воздействиями, возбуждающими вынужденные колебания системы в поперечно-вертикальной плоскости, являются силы инерции масс в переносном движении, возникающие при наезде лесопогрузчика на препятствие одним бортом.
где МГ - момент от сил упругости груза относительно оси Z;
В уравнениях (4) wi - парциальные частоты упругих элементов системы; hi - коэффициенты демпфирующих сопротивлений в системе. Значения указанных параметров для трех классов лесопогрузчиков (25, 35, 63 кН) получены в работе (Полетайкин, 1997).
где h(t) - текущее значение высоты препятствия;
Вынужденные колебания в этом случае являются следствием действия сил инерции масс в переносном движении
Выразим перемещения Lx(t) и lx(t) через перемещения h3(t).
здесь
Вертикальное перемещение
где КП - коэффициент, учитывающий влияние размеров звеньев кинематики ходовой системы трактора на вертикальные перемещения корпуса при движении машины через препятствие (передаточное число механизма подвески корпуса).
При использовании в системах дифференциальных уравнений обобщенных координат в виде угловых перемещений (bС, bК, b) моменты сил инерции масс переносного движения определяется по выражениям:
здесь Ic1, Ic3 - центральные моменты инерции масс m1+m2, m3 относительно осей Z1 , Z2, проходящих через точки 1,2 (рис. 2).
где IВ, IК - центральные моменты инерции масс
Из рисунка 2
При переезде препятствий hmax? 0,5 м bП<10°.
Подставляя (5) в (18) и дважды дифференцируя, получим выражение углового ускорения масс в переносном движении:
С учетом (13), (14), (15), (16), (19) выражения правых частей уравнений (2) принимают следующий вид:
Левые части уравнений (2), (4) отображают состояние рассматриваемой системы и включают ее основные динамические характеристики – Ci,mi,hi,wi, а также геометрические параметры. Правые части указанных уравнений представляют собой внешние возмущающие воздействия на систему. Они включают в себя эксплуатационные факторы – hmax, V, от которых зависит уровень внешних возмущений на систему и величина динамических нагрузок на элементы системы. Таким образом, разработанные модели позволяют выполнять исследования влияния на величину динамических нагрузок, действующих на рабочее оборудование в поперечно-вертикальной плоскости, конструктивных (параметров системы) и эксплуатационных факторов. Кроме этого, варьированием размеров l3, l4 они позволяют исследовать влияние смещения центра тяжести груза от продольной оси машины на уровень боковых динамических нагрузок. БИБЛИОГРАФИЧЕСКИЙ СПИСОК
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||